Department of Systems and Control
Jožef Stefan Institute





|
Customer |
EC 6th FW project, COOP-CT-2006-031638 |
|
Duration |
2006 - 2008 |
|
Objectives |
Development of multi-parametric predictive controllers based on constrained linear and hybrid models, suitable for practical application in low-level control. |
|
Description |
Offset-free tracking formulations for MPC controllers featuring efficient disturbance rejection based on the Kalman filter have been applied with explicit (multiparametric) MPC controllers that have been previously used only with specific tracking implementations. |
|
Innovation |
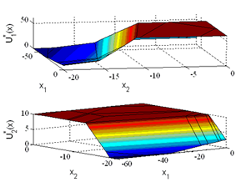
Local linear analysis for offset-free tracking formulations for MPC controllers featuring efficient disturbance rejection based on the Kalman filter is provided. Analysis results may be visualised in time domain, frequency domain, or on the complex plane. It is required for tuning of feedback properties of MPC controllers for efficient and robust performance, which is most important in low-level control applications. Analysis may be performed with plant-to-model mismatch, with a set of candidate true models. With online MPC controllers, analysis is performed for the unconstrained region; with explicit (multiparametric) MPC controllers, the performance in constrained regions may also be examined. |
|
Benefits |
Practical implementation of small-scale MPC problems for low-level control application using explicit MPC is simplified. |
|
Info |
Home |
News |
Contact |
Language |
Login
Introduction |
People |
R&D topics |
Projects |
Education |
Publications |
Applications |
Partners |
Career
Copyright © 2007-2026 IJS All rights reserved.